建筑物地图与室内定位导航
Building map and indoor positioning navigation
课题组简介
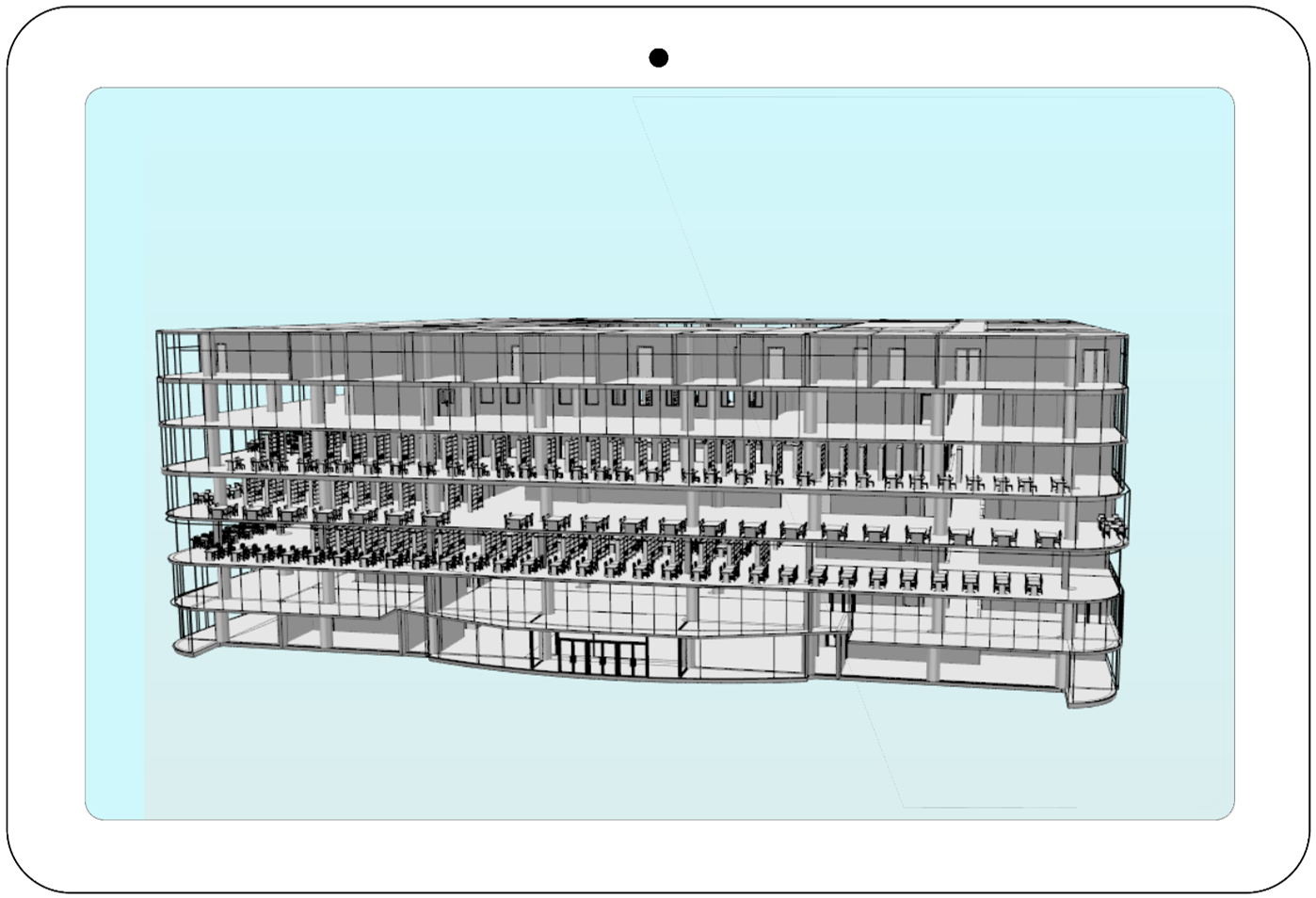
本课题组研究(1)以建筑信息模型(BIM)、无人机倾斜摄影、激光雷达(LiDAR)、IoT多源传感器、手机近景摄影为主要数据源,结合移动GIS及XR等技术构建室内外一体化的高精度建筑实景全息地图;(2)利用建筑地图中的几何信息、属性信息及拓扑关系,融合IoT多源传感器实现建筑场景实时感知与定位导航,并结合面向建筑实景地图的场景AI识别来进一步提高室内定位导航的精度;(3)基于建筑物实景全息地图和手机室内定位导航技术体系,提供完整的建筑地图-室内定位导航-室内位置服务的前瞻性解决方案,拓展建筑地图专题应用新视界。